NVYMK1.
This project was to done to get myself introduced with kinematics and designing mechanisms. It is a 6 degree of freedom robotic arm that makes use of gearboxes and belts in creative ways to achieve more power from accessible motors. While it has yet to come to life I do plan on creating it and writing a custom program for controls.
model viewport
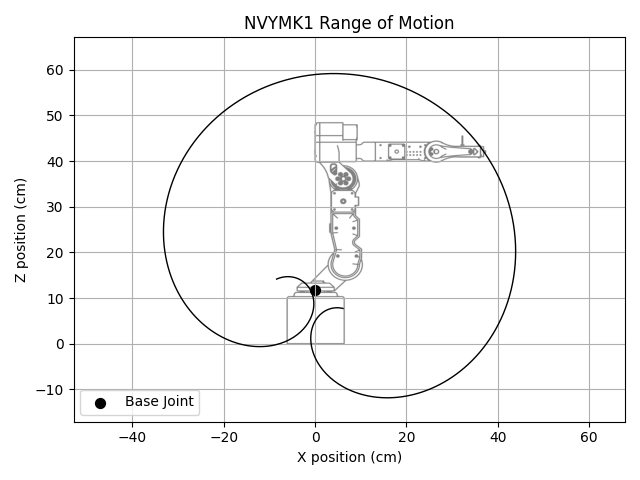
range of motion data
part specifications
- Double-shaft planetary gearboxes 27:1
- Nema 23 step motor
- Nema 17 step motors
- Nema 11 step motors with planetary gearboxes
- Nema 8 step motor
- 3D printed components